Output of Blade Kinematics
Blade Deflection Outputs
Blade deflections can be output at any station along the blade by activating Motion found in the Blade outputs, as seen in Figure 1, by clicking the Calculation Outputs... button on the Calculations screen.
The outputs must be for either the First blade, All blades, or not at all (None).
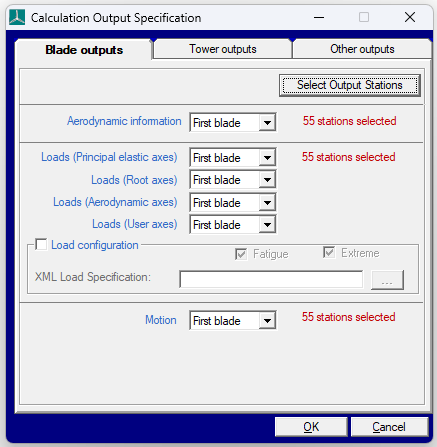
Blade deflections are given relative to the blade root coordinate system, with or without the pitch.
Blade Acceleration Outputs
Blade accelerations can be output adding the following code to Project Info:
MSTART EXTRA
OutputBladeAcc 1
MEND
Accelerations will be output at the same stations as the blade deflections. Accelerations are output in the blade principal elastic axes coordinates.
Blade Strain Gauge Outputs
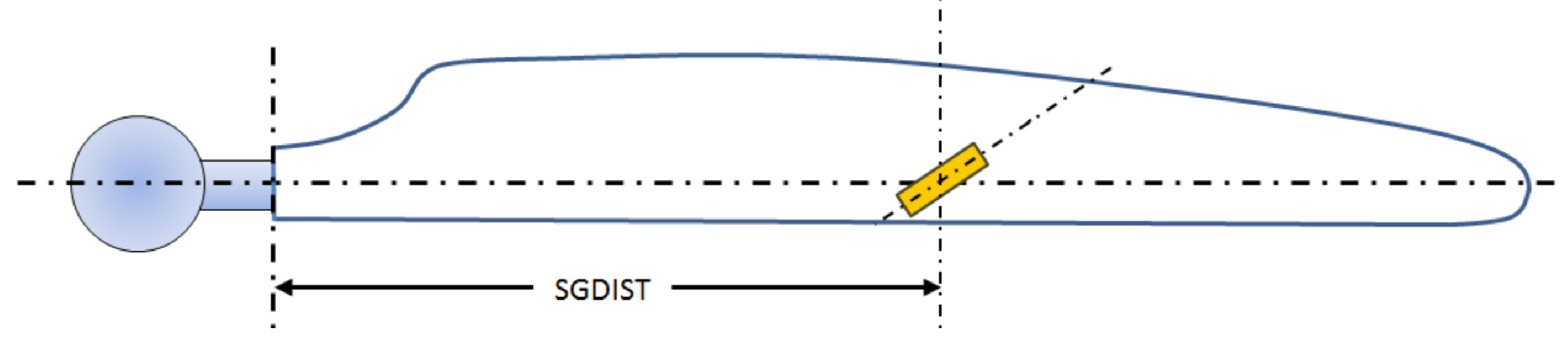
The external controller is already provided with a set of loading data, but it is possible to add additional strain gauges at any station on the tower or blade. Although called "strain gauges", these actually report forces and moments. Once specified, these will be updated before each call to the discrete external controller. Strain gauges on the blades are defined with a distance with the following code in Project Info:
MSTART EXTRA
NUMSGAUGES * number of blade strain gauge definitions to follow
SGDIST * Distance along the blade
MEND
The resulting load can be retrieved in the external controller using the function GetMeasuredBladeStrainGaugeFx, changing the last two letters for the relevant load component.
Blade Accelerometers Outputs
There are already a number of locations where the accelerations are measured on each discrete controller time-step. Additional locations can be added to the blades in a similar manner as for strain gauges. Accelerometers on the blades are defined in a similar manner to strain gauges with the following code in Project Info:
MSTART EXTRA
NUMBLADEACCELEROMETERS * The number of blade accelerometer definitions that will follow.
ACCDIST * Distance along the blade from blade root. This line is repeated for each accelerometer definition
MEND
The resulting accelerations are provided for X, Y, Z in the local blade’s coordinates.
Last updated 13-12-2024