Model Linearisation Calculation
Model linearisation generates input and state perturbations, and records the resulting variations in the state derivatives and the selected outputs. This is done for a series of steady-state power production operating points. The linear model post-processing calculation is then able to derive a linearised model of the turbine in state-space form. This is of particular value for designing controllers.
The possible input perturbations are wind speed, collective pitch angle/rate demand and generator torque. Optionally, linear horizontal and vertical
shear and pitch angle/rate demand on each blade can be perturbed.
These are particularly useful for individual pitch control design.
Model linearisation can also be performed over a range of azimuth
angles for each wind speed. This is useful for dealing with the azimuthal dependence of the structural coupling which usually happens for one
or two bladed turbines or floating simulations where gravity remains enabled.
Linearisation for closed-loop pitch actuators
If the pitch actuator is configured to use a dynamic response of type Closed Loop PI(D) the linearisation will by default include the proportional part of the controller as well as the feedback path. Selecting Pitch torque/force demand perturbation changes this by bypassing the controller, removing the feedback path and directly perturbing the drive torque/force demand in an open-loop manner. The user can then obtain an appropriate Linear Time Invariant (LTI) model of the pitch actuator for the purpose of designing and tuning the pitch actuator controller, especially if advanced features like pitch high-speed shaft flexibility have been activated.
If the perturb pitch torque/force option is selected the user should specify the magnitude of the pitch drive demand perturbation that Bladed should perform. If desired and supported by the pitch actuator the Perturb pitch for each blade flag can be ticked to perform individual perturbations for each blade, as well as the collective pitch perturbations.
If activated Bladed will omit the dynamics from the pitch actuator controller during the linearisation process. Instead, the conventional perturbation of the pitch angle/rate demand will be replaced with the perturbation of the torque demand \(\tau_d\) for a rotary drive or the perturbation of the force demand \(f_d\) for a linear drive, see Figure 1 and Figure 2. The user has the option to select the respective drive demand as a signal in the Linear Model post-processing calculation to create a LTI model.
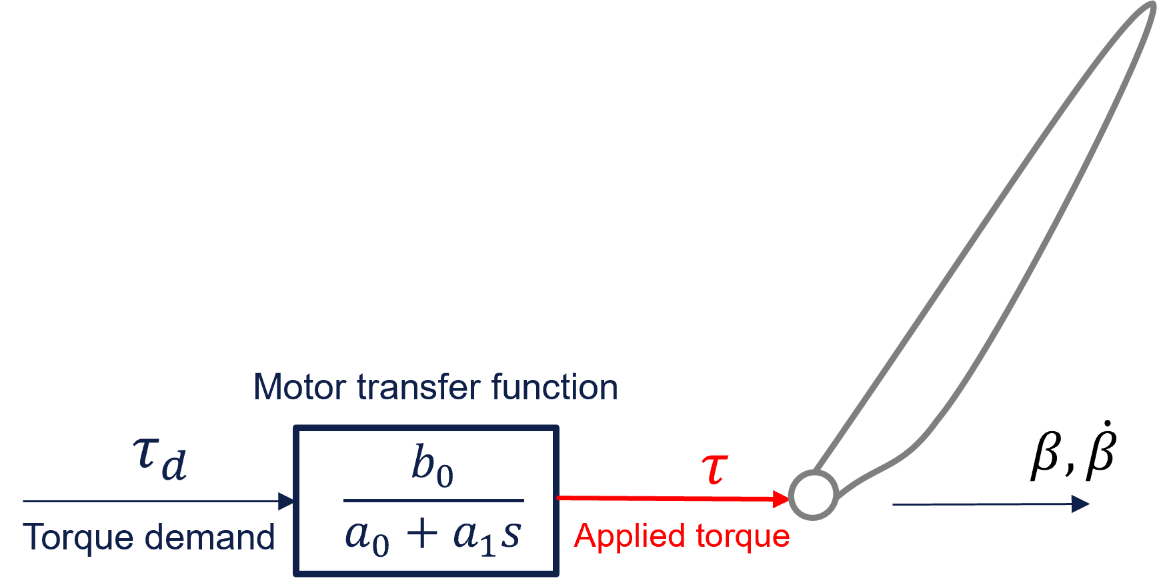
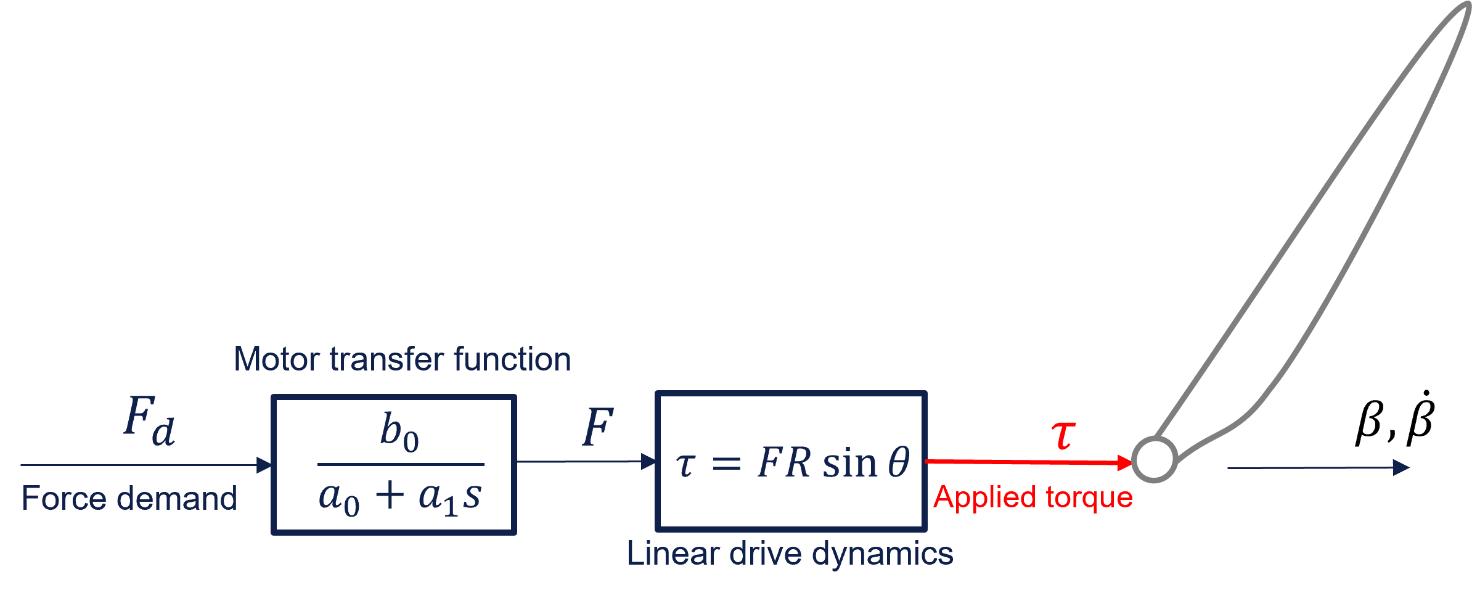
The feature will generate the signals "Blade X pitch actuator torque/force demand" and "Collective pitch actuator torque/force demand", for use in subsequent Linear Model post-processing calculations.
Note
This option is not available for pitch actuators with a passive dynamic response. Also, this option is only compatible with model linearisation calculations and will not be used in other calculations types such as dynamic calculations.
Last updated 13-12-2024