Comparison against Analytical Solutions for a Two Degree of Freedom Aerofoil
In this articles the analytical flutter boundary for a 2 degree of freedom (DOF) aerofoil will be compared against an equivalent numerical model in Bladed.
Governing Equations
To test the basic functionality of the stability tool a comparison is carried out between an analytical solution of a two degree of freedom pitching and plunging aerofoil and the numerical solution in Bladed. Figure 1 shows an example of a 2D aerofoil that is attached to a linear \(K_h\) and a torsional \(K_{\phi}\) spring. The aerofoil is assumed to have a mass \(m\) which is located at a distance \(d\) from the spring mounting position also referred to as the elastic axis. Further the aerofoil has a rotational inertia \(J\).

If one would assume flat-plate theory and fully steady aerodynamics, then the steady aerodynamic lift force and moment force can be described as:
where:
- \(U\) is the relative wind speed at the aerofoil
- \(\rho\) is the air density
- \(e\) is the offset between the elastic and aerodynamic axis
- \(d\) is the offset between the elastic and mass axis
- \(q_{\infty}\) the dynamic pressure
- \(S\) the wing surface area
- \(\theta\) spring rotation angle
- \(h\) spring translational displacement
Then the equations of motion of the system are:
Further if the damping due to the motion of the aerofoil is included the lift force can be rewritten as:
Substituting this into the equations of motion yields:
Assuming a harmonic solution of the form \(h(t) = \ \widehat{h}e^{\lambda t}\) then an eigenvalue problem is formulated yielding to the characteristic equation
where:
If the low frequency damping is included then the characteristic equations takes the form
Equation \(\eqref{eqn:char}\) cannot be solved analytically and requires a numerical root
finder. This is carried out using the numpy.roots() function in a Python
script.
Comparison of Bladed to Analytical Solution for a Flat-Plate Aerofoil
A Bladed model is created representing a two degree of freedom aerofoil. Modelling this simple case in Bladed is relatively challenging as Bladed is not designed to model two-degree of freedom systems. The 2D aerofoil is therefore modelled as a 100 \(\bunit{m}\) blade with a uniform torsional and flapwise stiffness. The edgewise stiffness is kept a factor 5 above the flapwise stiffness to ensure that the first two blade modes are a flapwise and torsional mode. Further the mass and inertia is concentrated near the tip by using a split station at the last 1m of blade length. The first 99m of the blade is modelled with nearly zero mass and inertia. Finally, the first 99m of the blade uses an aerofoil with zeros as coefficients for lift, drag and moment coefficients. The last 1m of the blade is using a flat-plate aerofoil with \(C_l= 2 \pi \sin (\alpha)\).
To represent the bending/torsional stiffness of an equivalent single mass-spring system the following well-known cantilever deflection \(\delta\) and torsional rotation \(\theta\) formulas are used
The following variables are defined:
- \(M\), bending moment applied at the free end of the beam,
- \(L\), beam length,
- \(EI\), beam bending stiffness,
- \(F\), discrete force applied at the free end of the beam, and
- \(GJ\), torsional rigidity of the beam.
The equivalent spring constants then are:
Table 1 summarizes all the inputs to the model.
| Parameter | Quantity | Unit |
|---|---|---|
| Rotational inertia | 0.75 | kgm |
| Mass | 10 | kg |
| Linear spring constant | 30000 | kg/m |
| Torsional spring constant | 3000 | kg/m |
| Centre of mass | 45 | % chord |
| neutral axis | 25 | % chord |
| Shear centre | 25 | % chord |
| Flapwise frequency | 7.9 | Hz |
| Torsional frequency | 11.1 | Hz |
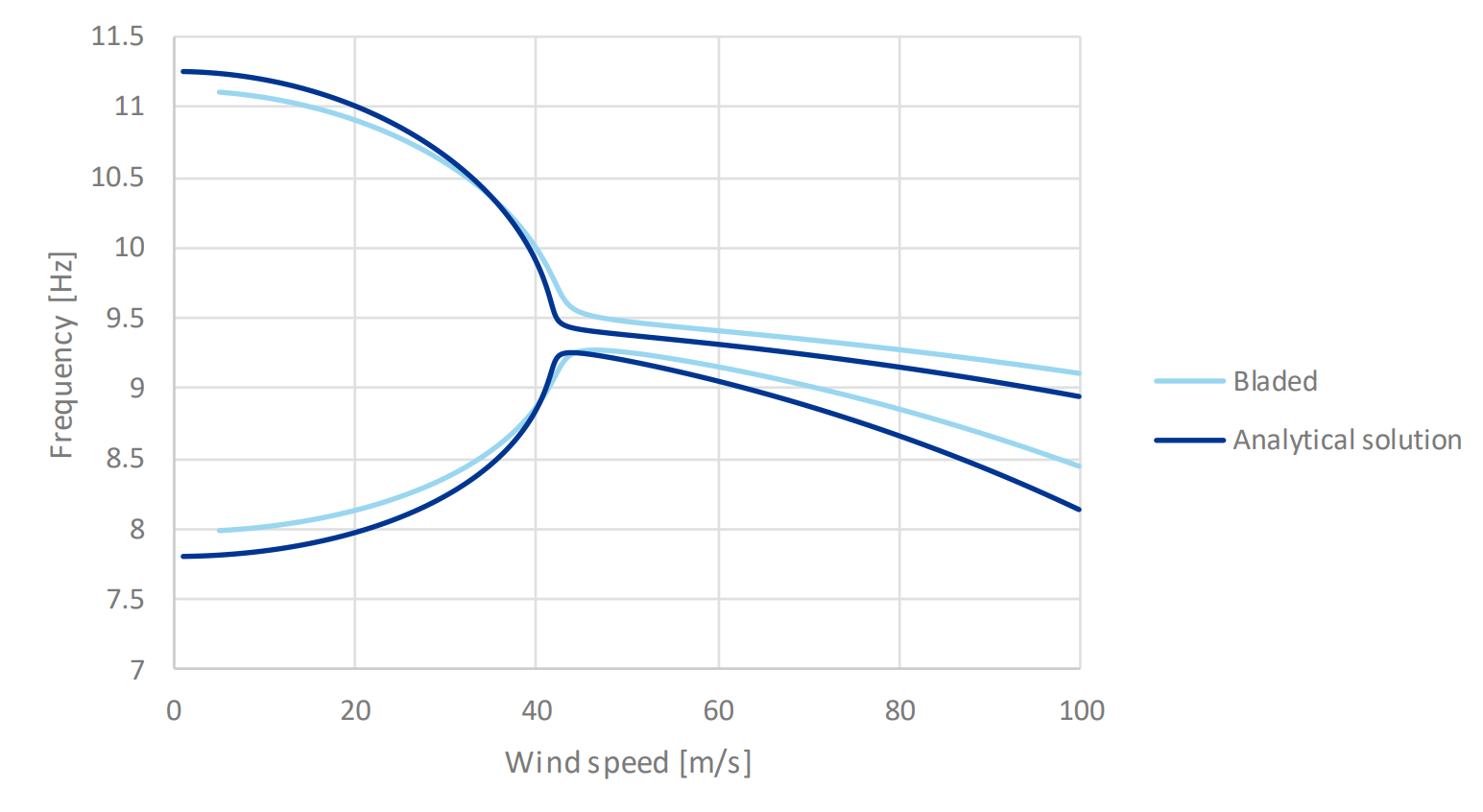
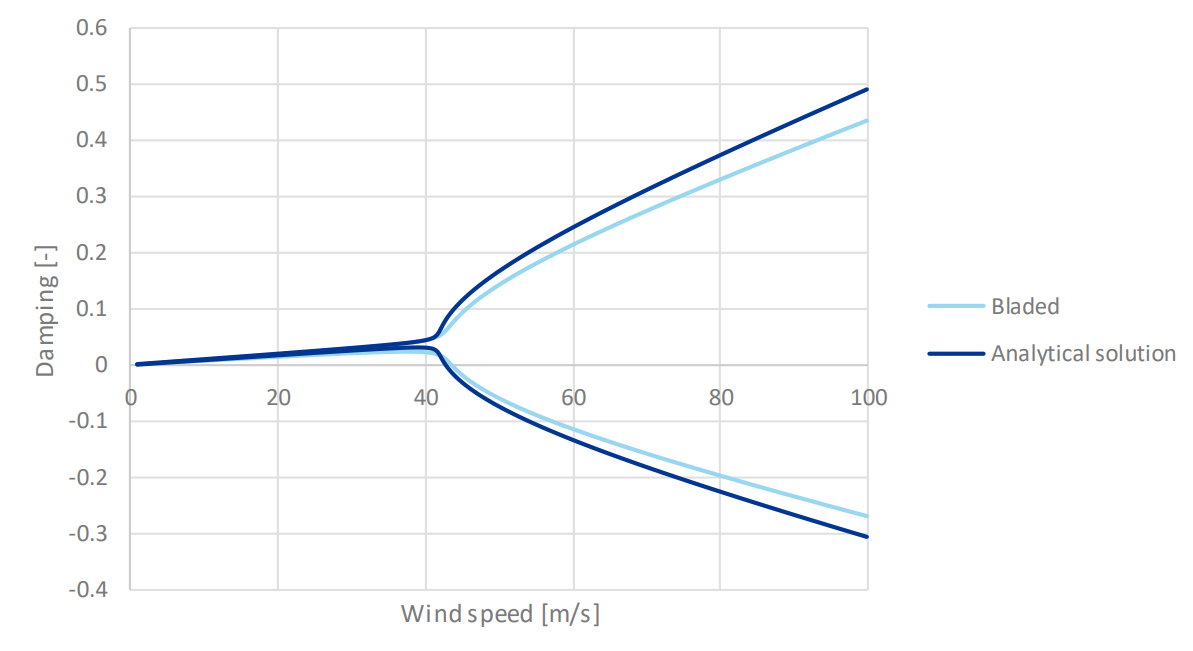
The results in Figure 2 and Figure 3 demonstrate a good match between the Bladed simulation and the analytical solution. In both cases the frequency branches merge around 43 m/s. At this same wind speed the damping of the torsional mode goes negative.
Last updated 09-09-2024